Pathfinding and Localization in AR from Floor Plan Data
Tamara Gini
Master's Thesis, May 2023
Supervisors: Börge Scheel, Henry Raymond, Dr. Fabio Zünd, Prof. Dr. Bob Sumner
Abstract
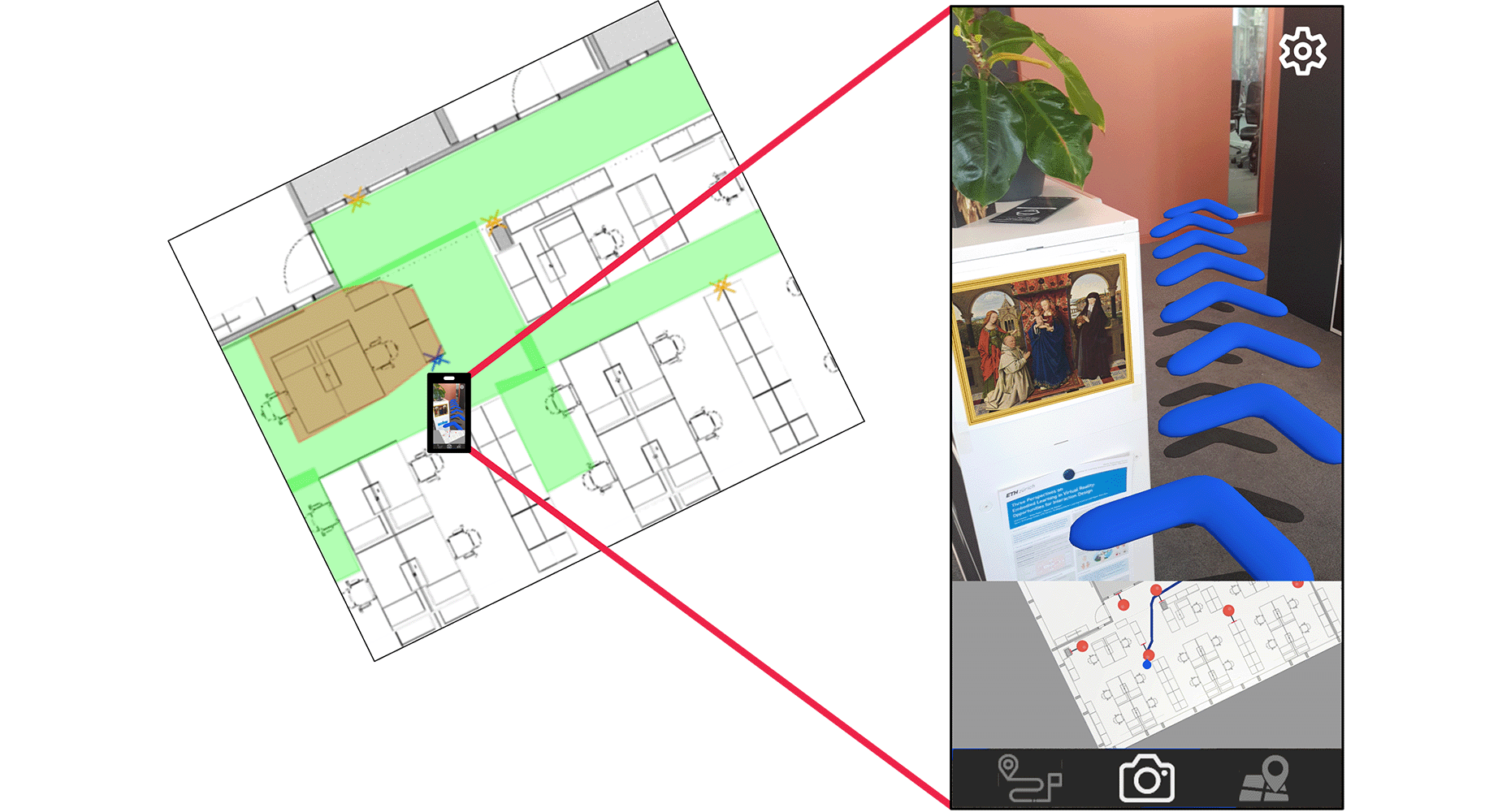
Adopting Augmented Reality (AR) content in museums is an opportunity to enhance visitor experiences. By also incorporating navigation information into AR applications, we can further improve the user experience. Navigation in indoor environments is a feature many mobile apps would like to offer. However, due to the lack of reliable GPS data, indoor localization remains a challenge. Many existing solutions rely on dense deployments of Bluetooth beacons, which can be costly. In this thesis, we focus on a method to estimate positions that does not require any additional hardware, apart from the user’s phone. Our indoor user localization algorithm utilizes data from the accelerometer, the gyroscope, and AR tracking. We use the resulting position estimate in conjunction with floor plan data for navigation.
We implemented two localization methods, namely dead reckoning and Pedestrian Dead Reckoning (PDR). We found that dead reckoning suffers from noise and sensor drift, even with calibration and Zero Velocity Potential Update (ZUPT) techniques. PDR, although more robust against noise, required users to adhere to specific constraints regarding phone handling during movement. When executed correctly, PDR demonstrated high localization accuracy, but there were substantial variations in accuracy among different individuals.
We conducted a user study to compare three different approaches for presenting navigation information in AR. The findings indicate that a balance between clear path visualization and simple on-screen instructions is crucial.